Effcient Acquisition and Realistic Rendering of Car Paint
Johannes Günther, Tongbo Chen, Michael Goesele, Ingo Wald, and Hans-Peter Seidel

Abstract
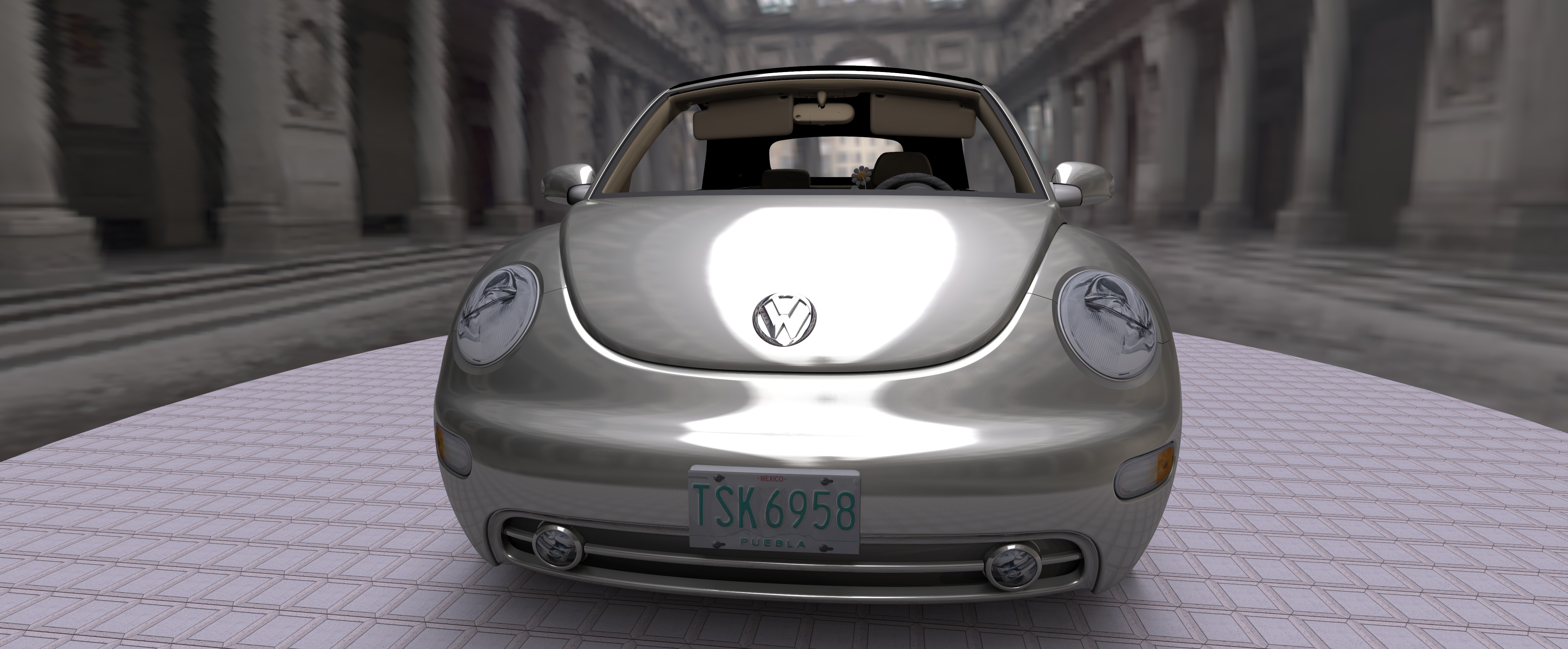
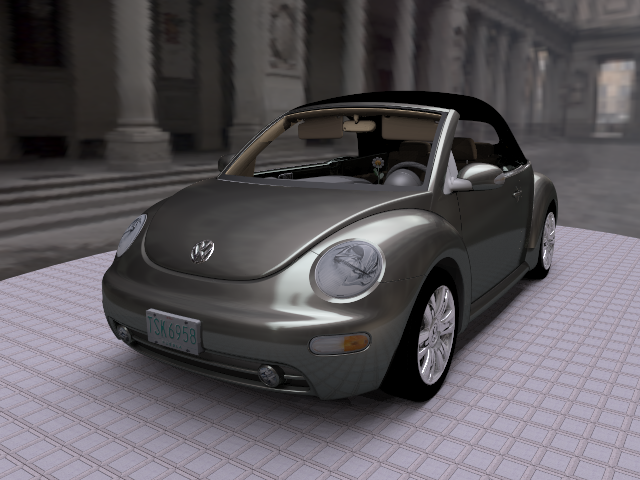
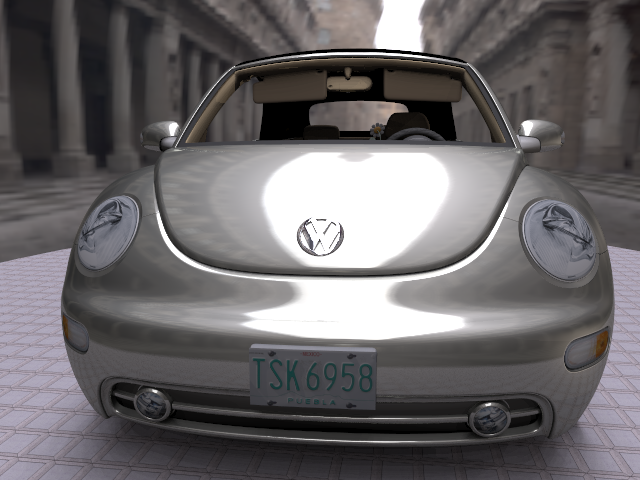
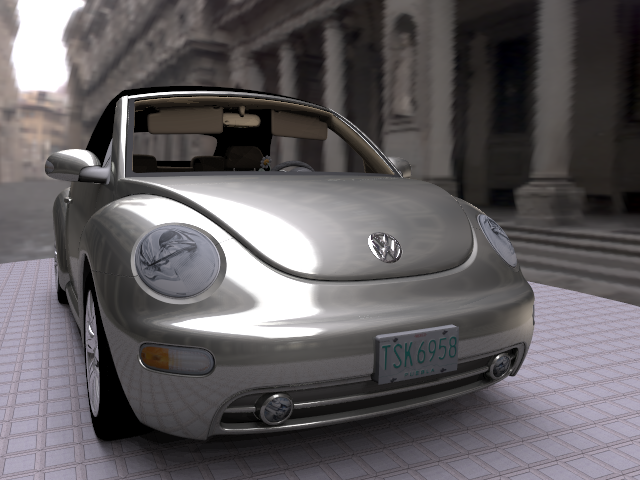
The outside appearance of cars is mostly defined through only two distinct materials – glass and car paint. While glass can rather easily be simulated by the simple physical laws of reflection and refraction, modelling car paint is more challenging.
In this paper we present a framework for the efficient acquisition and realistic rendering of real-world car paint. This is achieved by building an easy-to-reproduce measuring setup, fitting the measured data to a general BRDF model for car paint, adding a component for simulating the sparkling effect of metallic paints, and rendering using a specially designed shader in a realtime ray tracer.